Deze website geeft een overzicht van mijn GSP-project. Je vindt hier informatie over mijn aanpak, mijn logboek en mijn planning.
Mijn GSP is een eindproject waarin ik mijn kennis en vaardigheden combineer. Ik werk aan een zelfgemaakte kegelbaan, de Mini Strike. Met mijn kennis en vaardigheden maak ik hier een mooi project van.

Ik ben Leon Vriesacker. Ik ben 17 jaar oud en ik woon in Vrasene. Ik zit al 6 jaar op GTI in Beveren. Hier volg ik de richting Informatica- en communicatiewetenschappen ICW. Mijn hobby's zijn zwemmen en 3D-printen
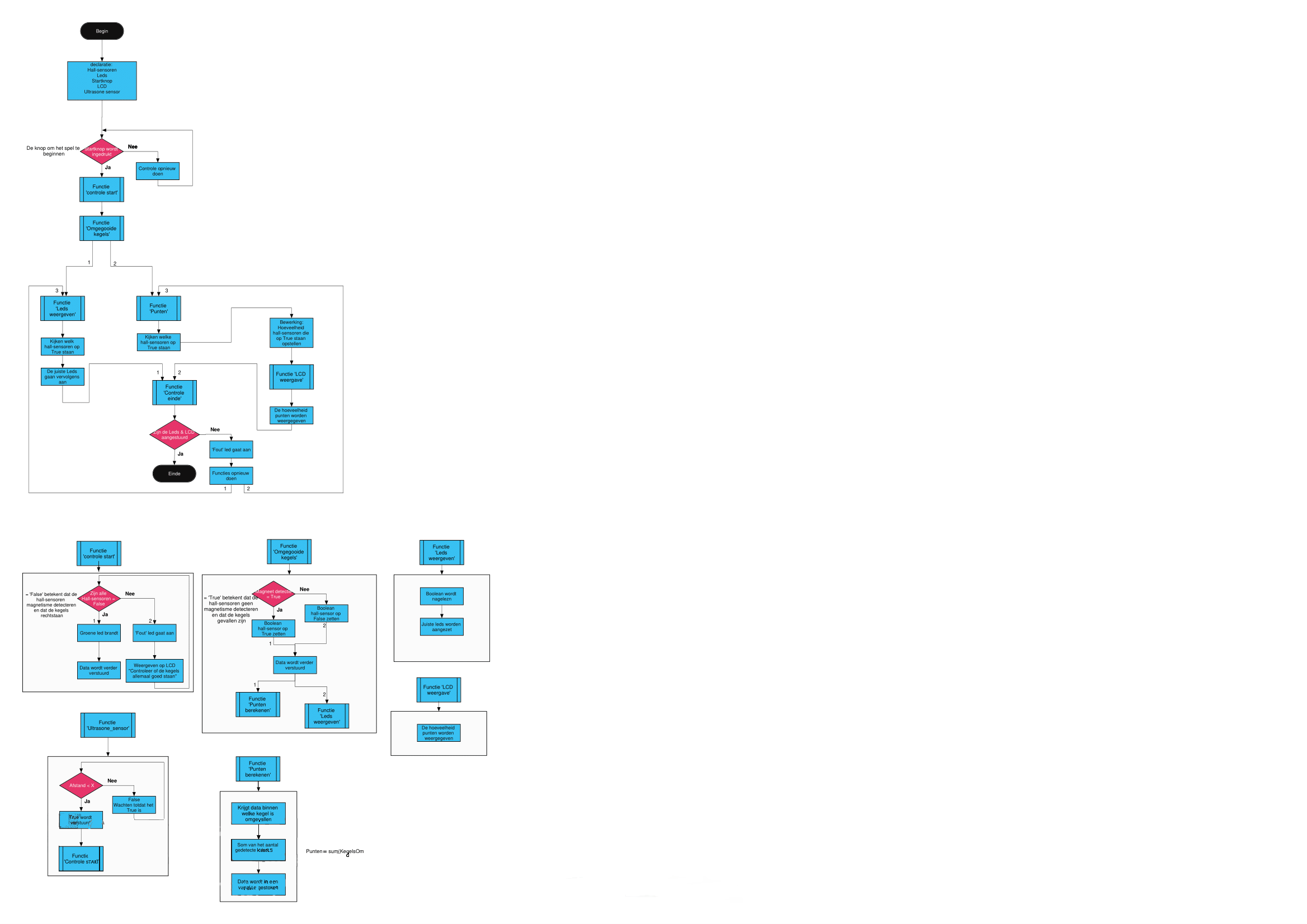
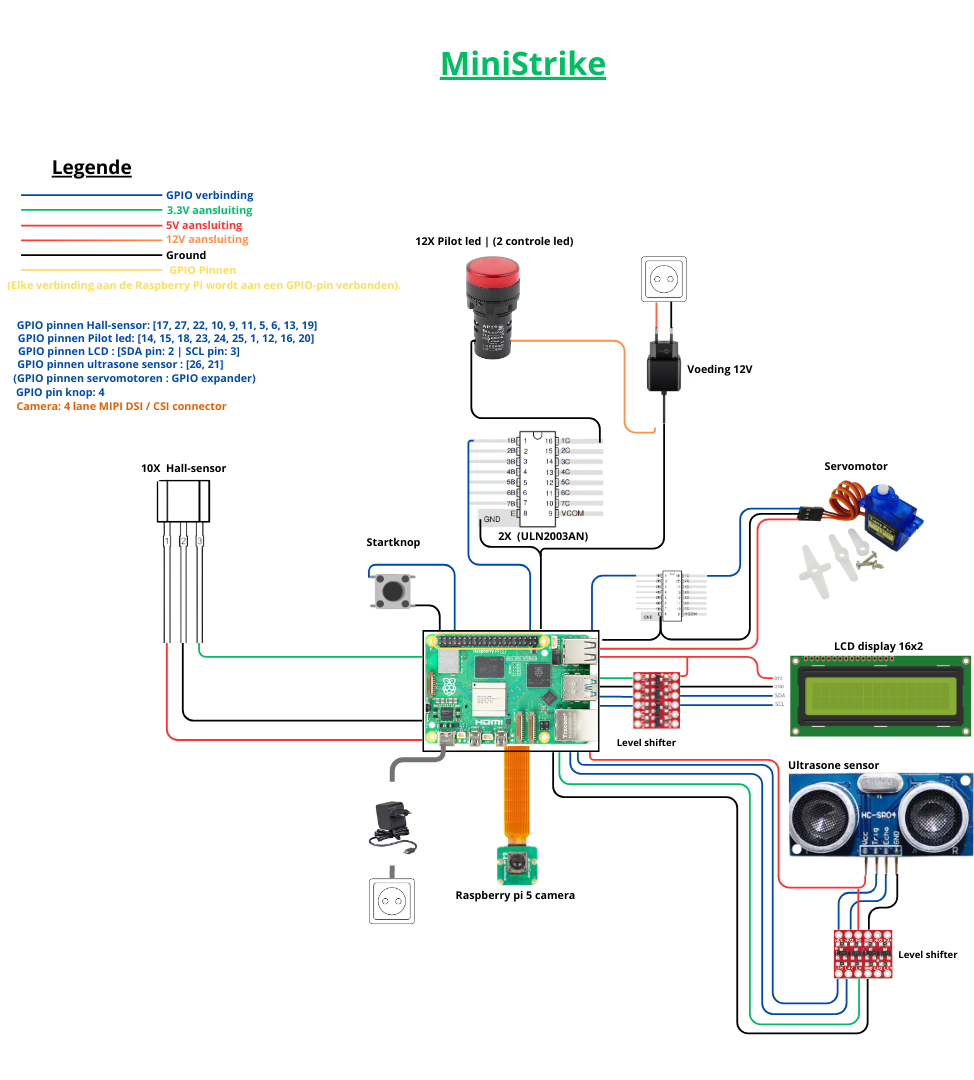
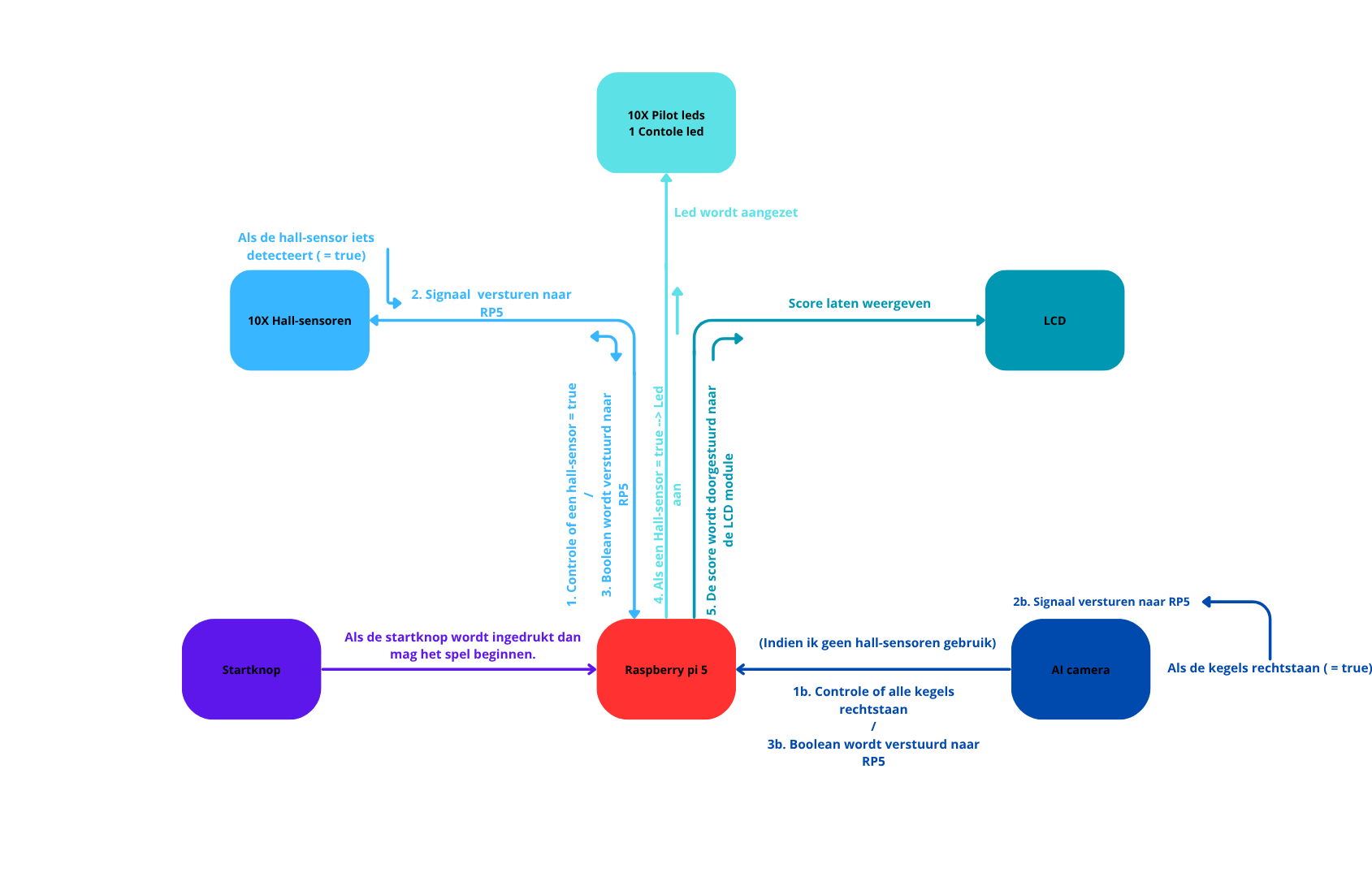
Voor mijn eindproject heb ik gekozen om een kegelbaan te maken. Mijn doel is om een functionele kegelbaan te ontwerpen volledig gemaakt uit hout en filament. Hiervoor zal ik gebruik maken van een Raspberry pi 5. Met behulp van servomotoren, leds, knoppen, hall-sensoren voor onder de kegels en met een display zal ik de kegelbaan optimaal maken. De hoofdfunctie van de kegelbaan is dat spelers de kegels omver kunnen gooien. Vervolgens worden de omgegooide kegels geregistreerd door de hall-sensoren en wordt het weergegeven op de display. De display onthoudt vervolgens de score dat de speler heeft gegooid.
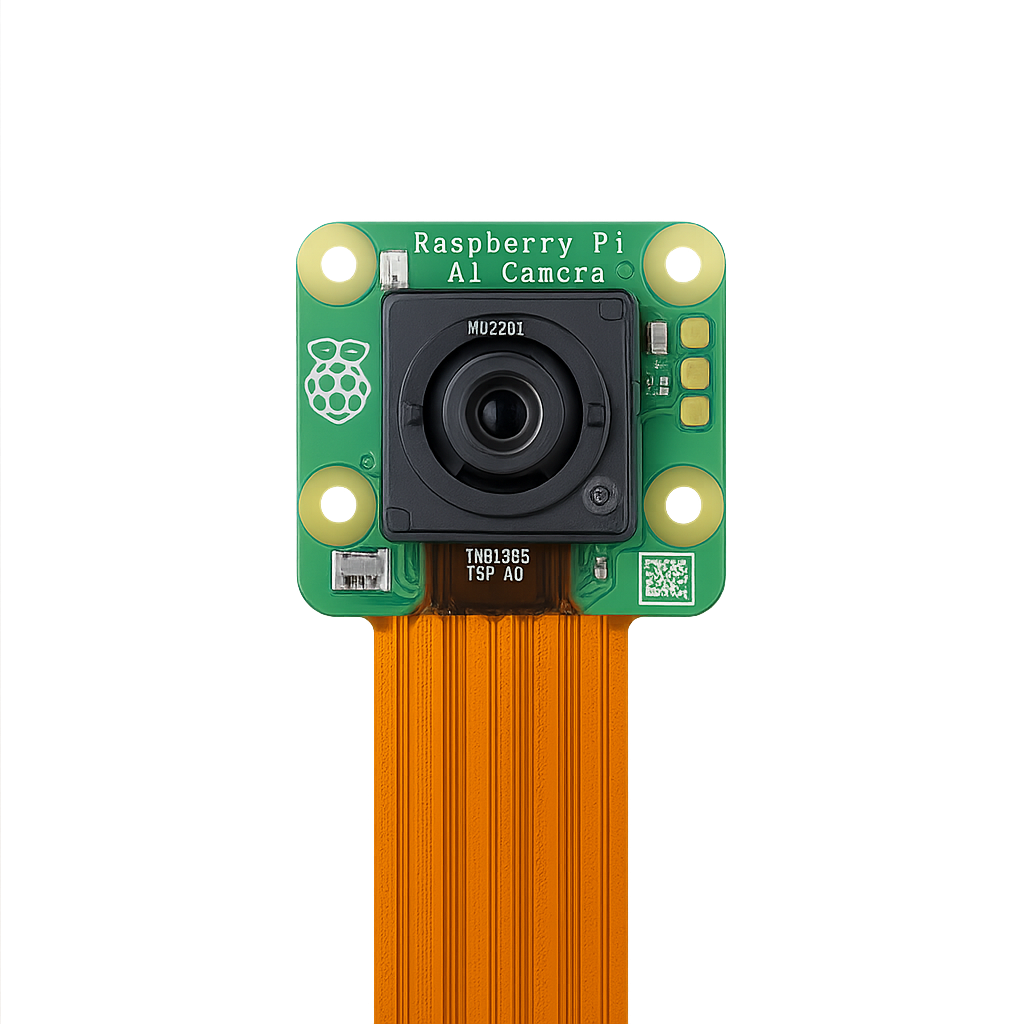
Een mogelijke uitbreiding voor mijn project is om de kegelbaan verder te automatiseren. Het idee is om de kegels automatisch terug te zetten na elke beurt met behulp van sensoren en servomotoren. Een andere uitbreiding is om meer spelers toe te voegen door een grotere display en een toetsenbord er aan te koppelen. Daarnaast zou het leuk zijn om ook animaties toe te voegen die verschijnen wanneer je een bepaald aantal kegels omgooit, vergelijkbaar met een echte kegelbaan. Ook kan ik een automatische balretour maken, zodat de bal na het gooien vanzelf naar de speler terugkomt. Voor een gevorderde uitbreiding zou ik met de camera van de raspberry pi 5 een AI-detectie kunnen maken om te herkennen of de gekegels zijn omgegooid.
Als stuurcomputer ga ik gebruik maken van een raspberry pi 5

Voor het registrieren van de omgegooide kegels ga ik gebruik maken van Hall-sensoren

De pilot LED ga ik gebruiken voor de omgegooide kegels te laten weergeven
De stekkervoeding ga ik gebruiken voor de pilot led van 12V te voeden
ULN2003AN ga ik gebruiken als schakelaar
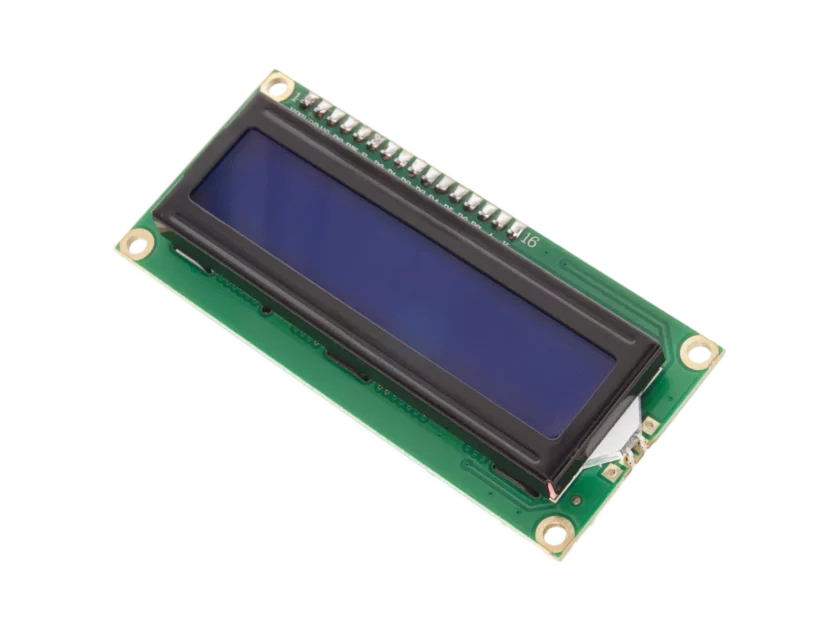
De display zal worden gebruikt voor de puntenverdeling te laten weergegeven

Ik zal de ultrasone sensor gebruiken om te registreren wanneer de bal voorbij rolt.
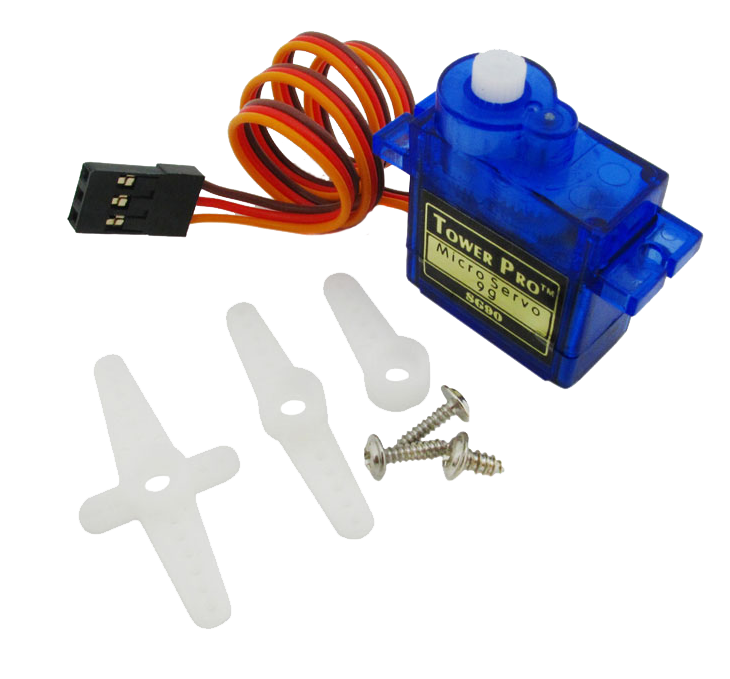
Servomotoren zou ik gebruiken voor eventuele automatisering van de kegelbaan.
Als uitbreiding zou ik het registrieren van de omgevallen kegels via een AI detectiesysteem laten registreren.
Het besturingssysteem dat ik ga gebruiken
De computertaal Python zal ik gebruiken voor mijn eindproject
In Thonny zal ik in Python code schrijven voor de Raspberry Pi
© MiniStrike. All Rights Reserved.
Designed by Leon Vriesacker