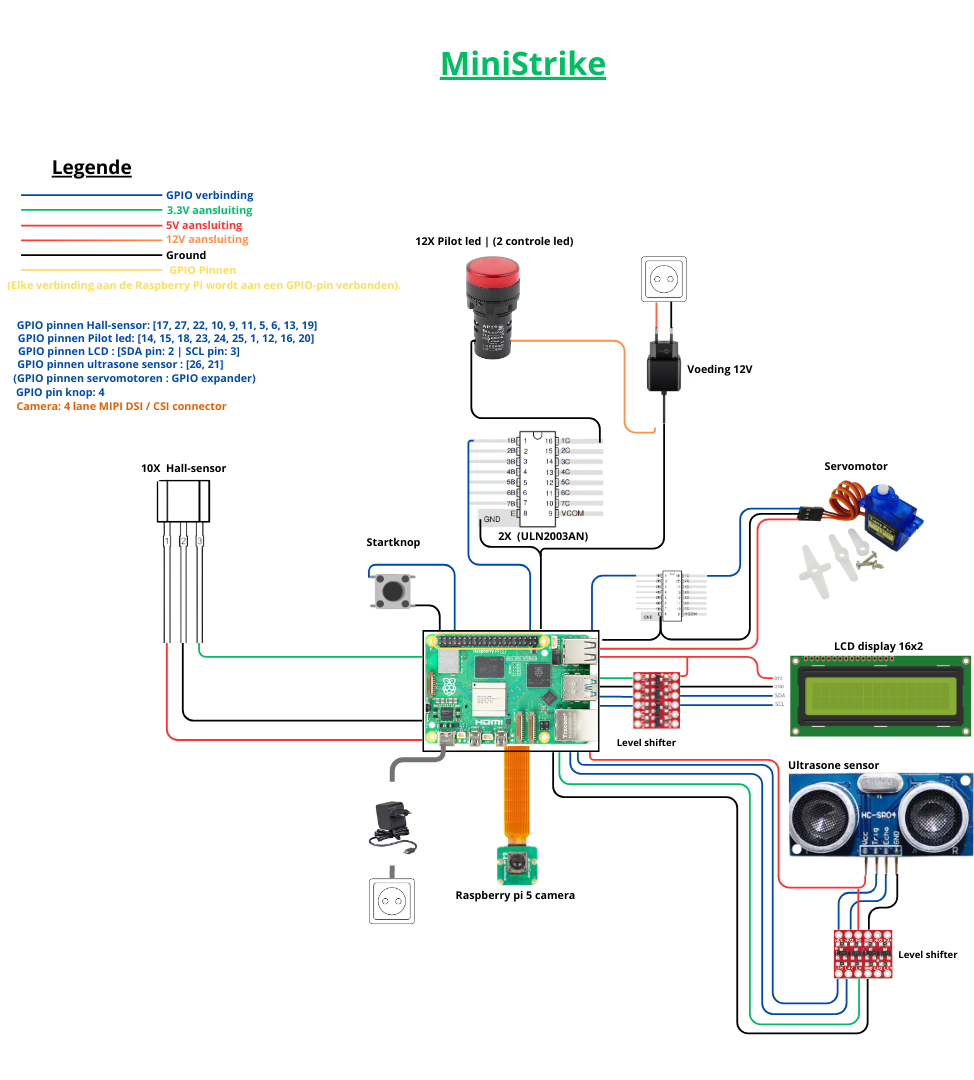
Schema en componenten
Componenten
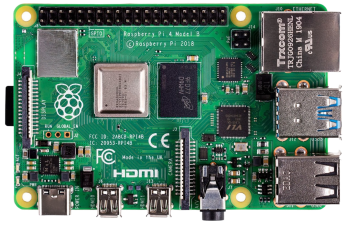
Computer
Raspberry pi 5
Als stuurcomputer ga ik gebruik maken van een raspberry pi 5.

component
Hall-sensor
Voor het registrieren van de omgegooide kegels ga ik gebruik maken van Hall-sensoren.

component
Pilot Led
De pilot LED ga ik gebruiken voor de omgegooide kegels te laten weergeven.
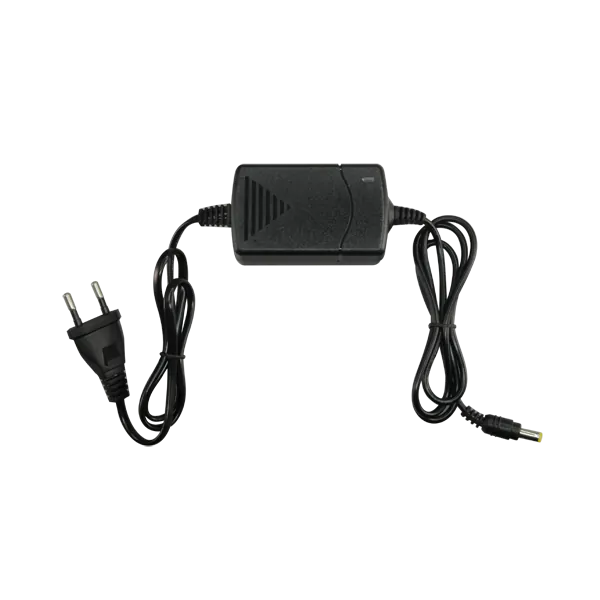
Voeding
Stekkervoeding 12V
De stekkervoeding ga ik gebruiken voor de pilot led van 12V te voeden.
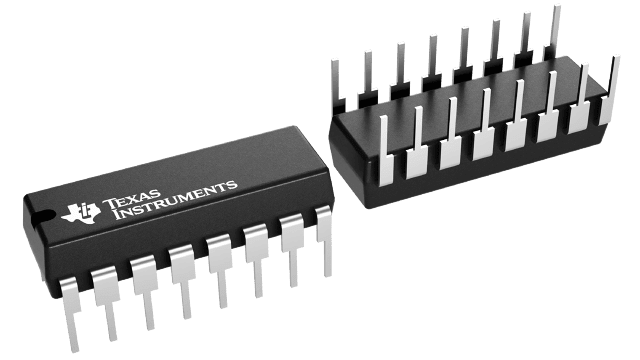
component
ULN2003AN
ULN2003AN ga ik gebruiken als schakelaar.
Component
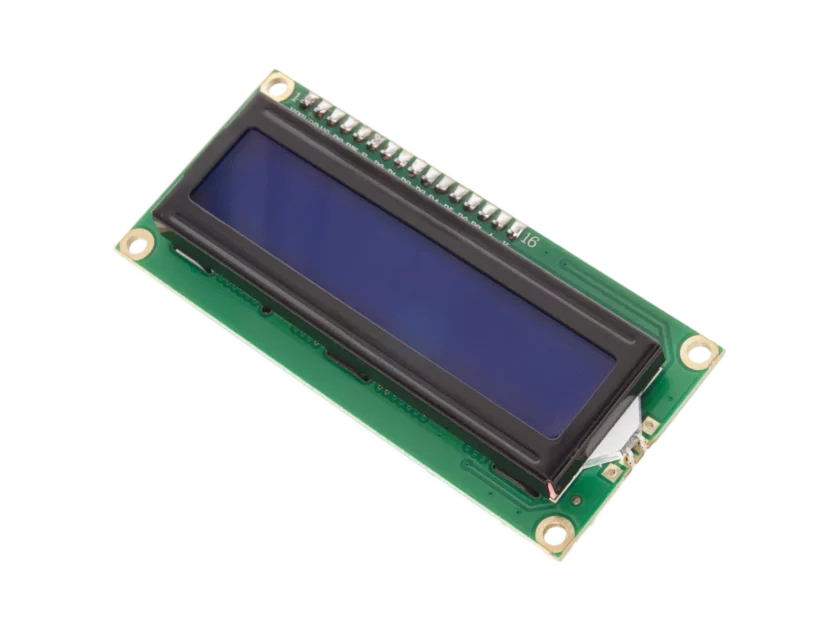
Display
De display zal worden gebruikt voor de puntenverdeling te laten weergegeven.

Component
Ultrasone sensor
Ik zal de ultrasone sensor gebruiken om te registreren wanneer de bal voorbij rolt.
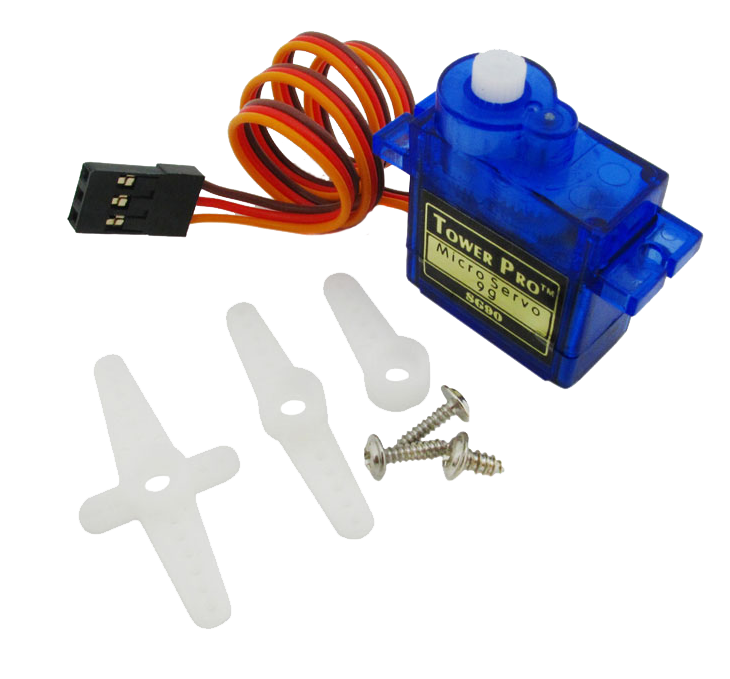
Component
Servomotor
Servomotoren zou ik gebruiken voor eventuele automatisering van de kegelbaan.
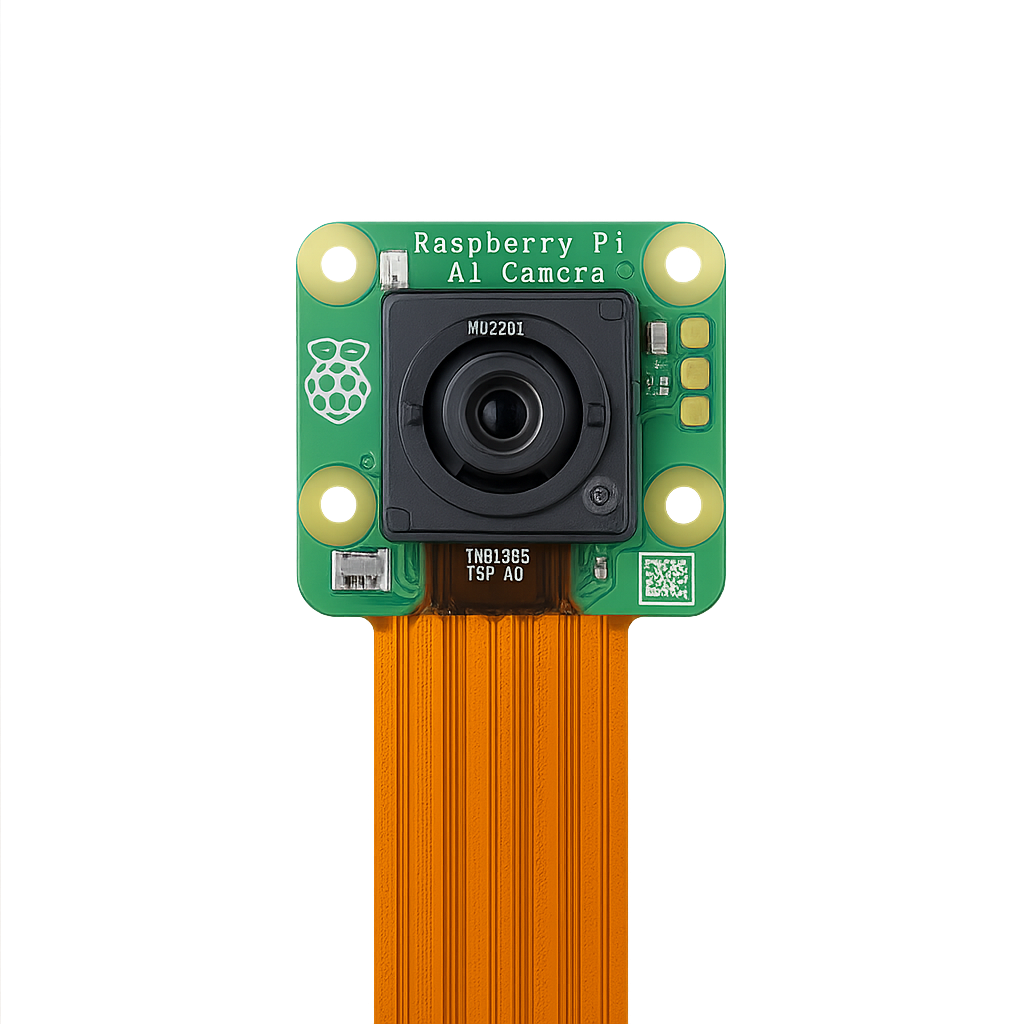
Camera
Raspberry Pi AI camera
Als uitbreiding zou ik het registrieren van de omgevallen kegels via een AI detectiesysteem laten registreren.